
Multi-Robot Autonomous Lunar Construction
Technologies & Skills
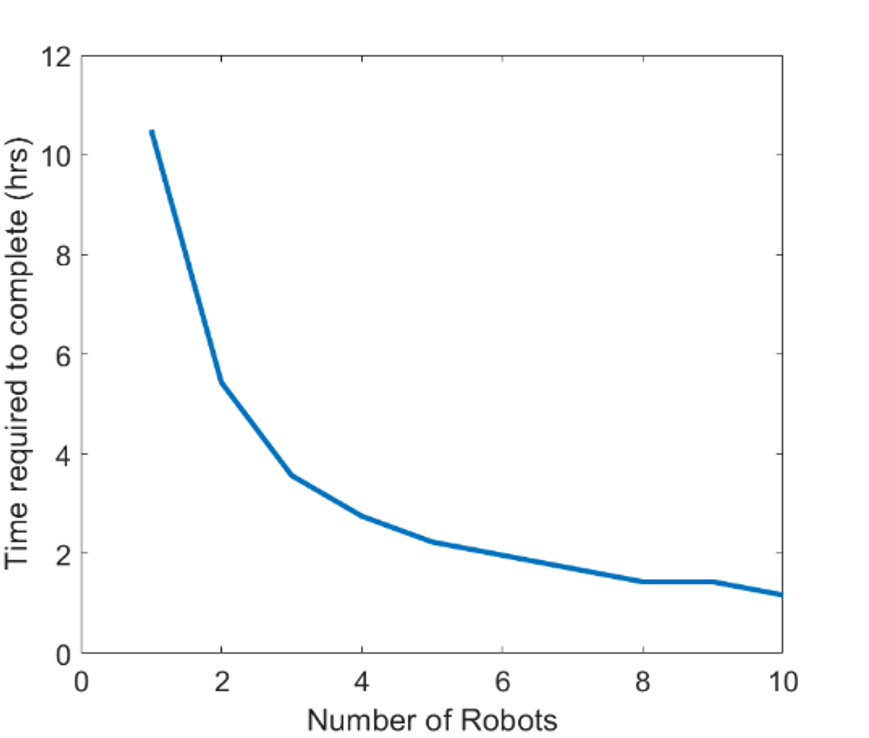
This project focuses on multi-robot coordination for autonomous lunar construction tasks, including autonomous path planning, collision avoidance, task scheduling, and collaborative construction of lunar habitats using MATLAB simulation.
- Developed autonomous path planning and navigation algorithms for multiple robots
- Implemented collision avoidance and cooperative control strategies for multi-robot systems
- Simulated construction tasks with real-time task assignment and execution monitoring