Projects
QUBE Servo Pendulum — RL (IsaacLab / PPO / SKRL) + CBF Safety
Technologies & Skills
Development and real-time deployment of RL policies for the Quanser QUBE Servo pendulum using IsaacLab training, PPO and SKRL implementations, and a Control Barrier Function (CBF) safety filter for safe real-world operation.
- IsaacLab training without domain randomization (and zero-shot sim to real transfer)
- PPO (implemented with SKRL) training & comparison with control barrier function (CBF)
- CBF safety wrapper used during hardware deployment
SMART Architectures for Lunar Bases: Sensor Networks and Autonomous Fire Fighting
Technologies & Skills
SMART Fire Fighting Architecture
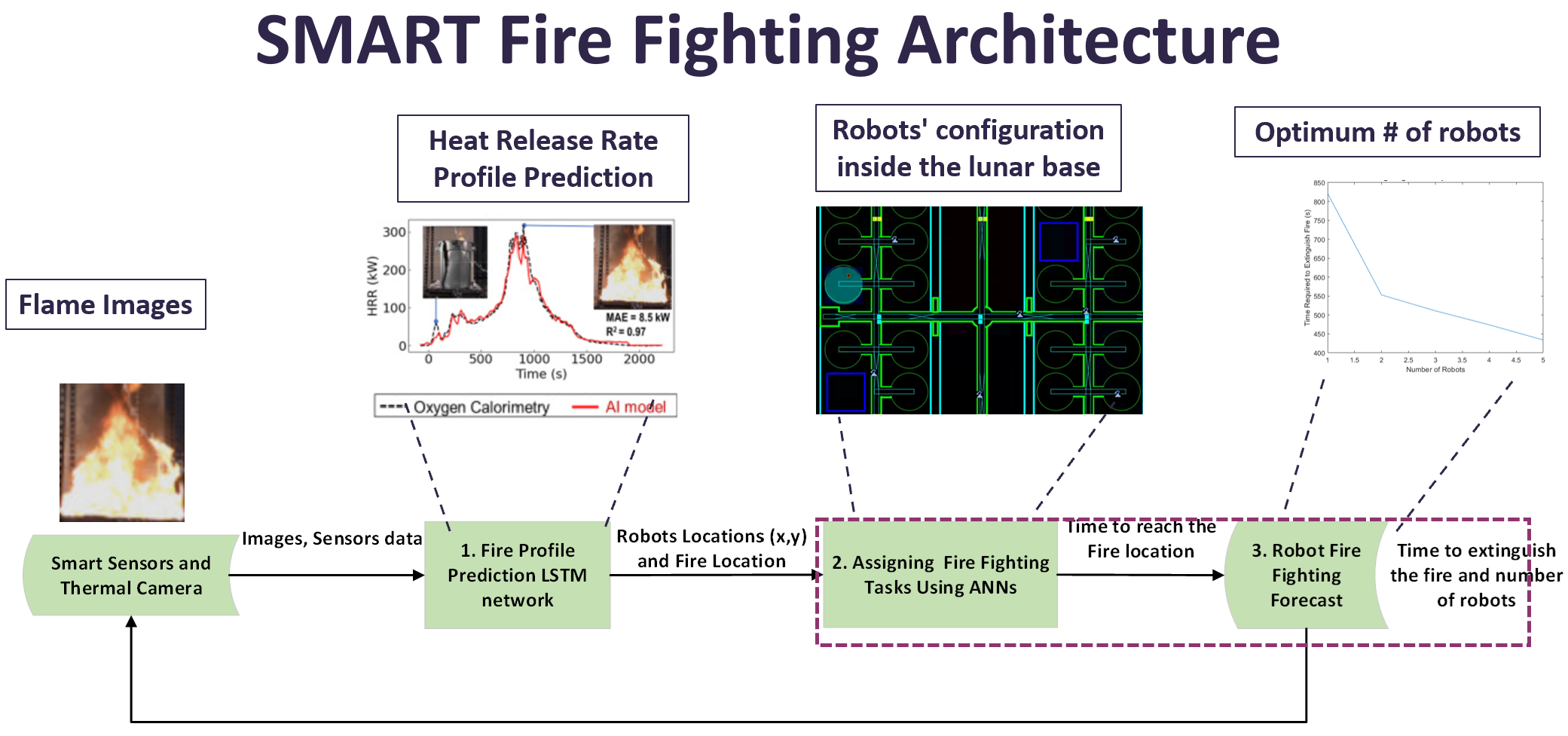
SMART Fire Fighting Architecture Overview
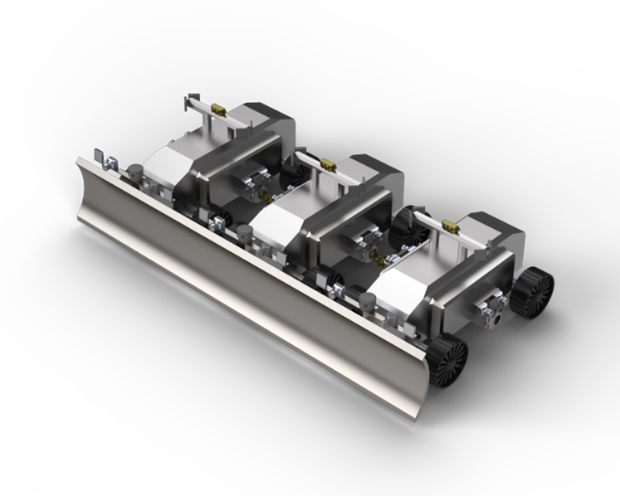
Fire Detection Simulation
3D Fire Fighting in Pressurized Module
Smart Sensor Network Components
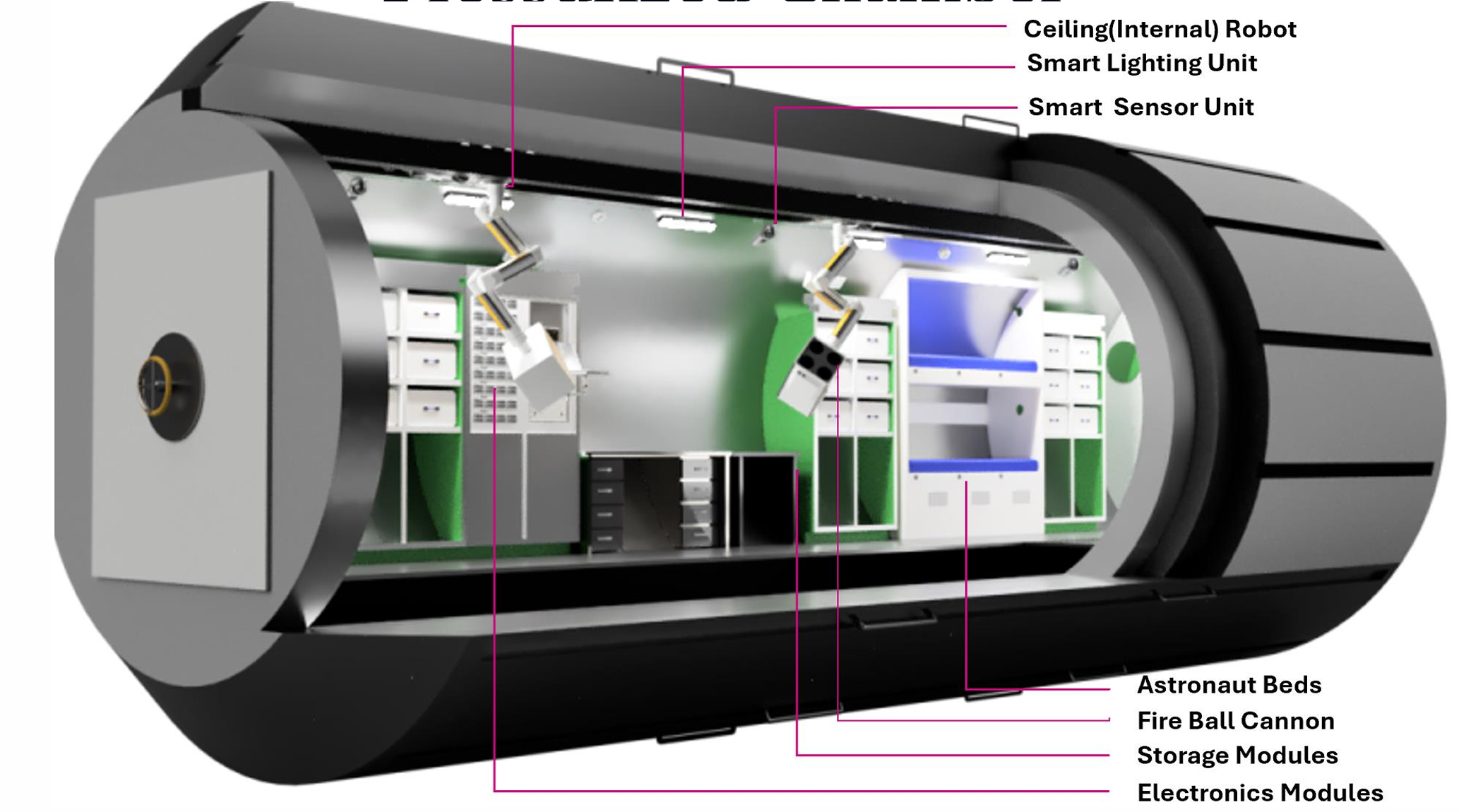
Lunar Habitat Module with Smart Sensors
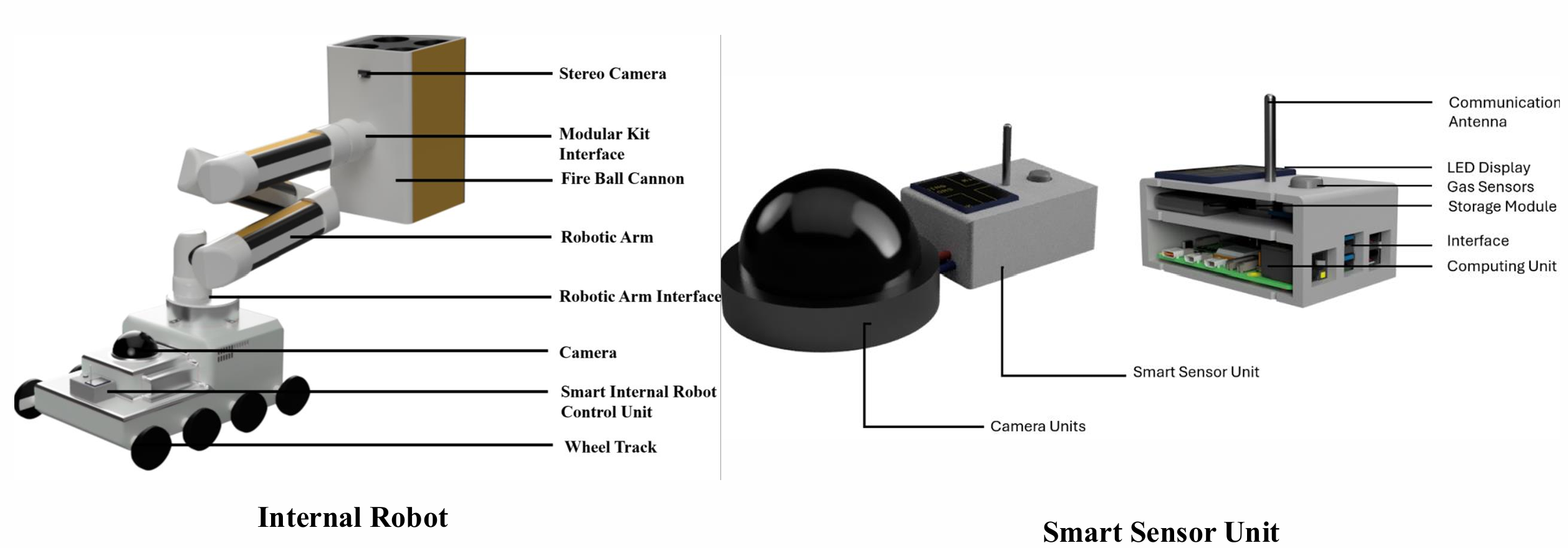
Smart Sensor Unit & Internal Robot
This comprehensive project integrates SMART (Scalable Mobile Autonomous Robotic Tech) Architecture for lunar bases, combining distributed sensor networks with autonomous fire detection and response systems. Using Physics Informed Artificial Neural Networks and intelligent sensor placement strategies, the system enables real-time decision-making and autonomous operations in extreme space environments, including emergency fire situations inside pressurized modules.
- Designed distributed computing architectures (Tile Computing Network) for sensor networks with hyper redundancy using docker swarm and raspberry pi
- Developed smart sensor nodes with local processing, collaborative decision-making, and autonomous response capabilities
- Implemented redundant network topologies ensuring system reliability and fault tolerance
- Created fire detection and response systems using sensor networks and autonomous robots for pressurized module safety
- Developed AI models for fire profile prediction, robot task assignment, and fire fighting forecasting
- Implemented physics-informed models for real-time environmental monitoring, hazard detection, and sensor data fusion
- Optimized power efficiency and communication protocols for resource-constrained space systems
Autonomous Construction of Lunar Landing Pad Using Network of Small Robots
Technologies & Skills

Single Robot Configuration
Chain Configuration with Multiple Robots
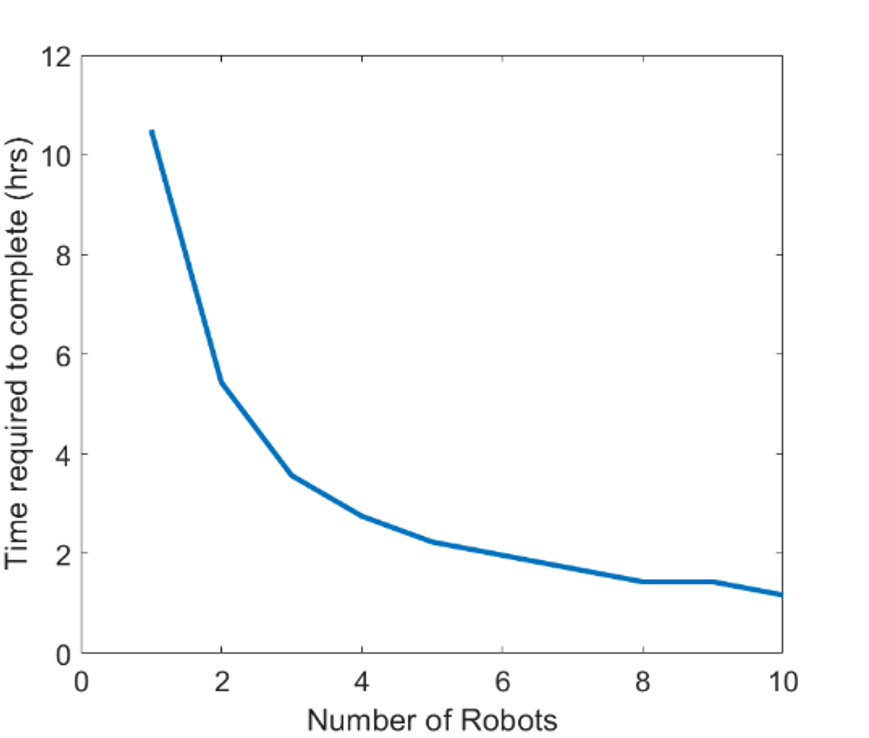
Comprehensive analysis of autonomous construction of lunar landing pads using a network of small robots with chain configurations. This research demonstrates how multiple coordinated robots can efficiently perform site preparation and landing pad construction tasks, achieving significant advantages over single-robot systems through distributed task allocation and collaborative execution.
- Developed distributed algorithms for multi-robot coordination matching centralized performance while achieving 93% progress on traversable terrain
- Analyzed chain-configured robot teams for site preparation, demonstrating 70% reduction in overall travel distance compared to single robots
- Implemented task allocation strategies optimizing robot workload distribution and minimizing congestion in high-density scenarios
- Designed autonomous construction sequences for lunar landing pad preparation including excavation, grading, and surface stabilization
- Evaluated system scalability and performance trade-offs with varying robot team sizes and terrain conditions
Multi-Robot Autonomous Lunar Construction System
Technologies & Skills
This project focuses on multi-robot coordination for autonomous lunar construction tasks, including autonomous path planning, collision avoidance, task scheduling, and collaborative construction of lunar habitats using MATLAB simulation.
- Developed autonomous path planning and navigation algorithms for multiple robots
- Implemented collision avoidance and cooperative control strategies for multi-robot systems
- Simulated construction tasks with real-time task assignment and execution monitoring
Asteroid Projects
Periodicity and Lifetime of Orbits Around Elongated Asteroids
Technologies & Skills
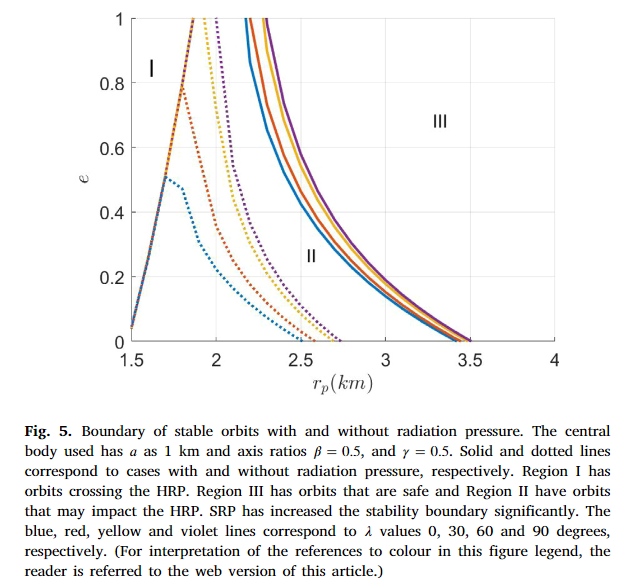
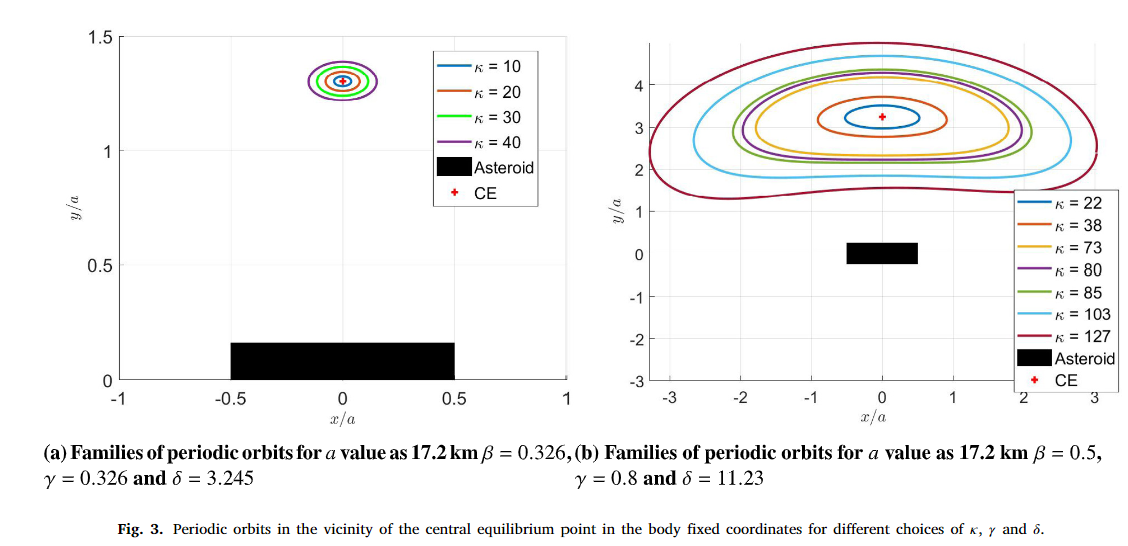
Analyzed dynamics and control of orbits around asteroids modeled as uniformly rotating homogeneous rectangular parallelepipeds (HRP). Identified circular periodic orbits, studied stability of non-circular periodic orbits, and derived analytical lower limits for uncontrolled spacecraft orbital lifetimes.
- Developed spherical harmonics, polyhedron, and closed-form expression gravitational models to simulate the gravity field.
- Studied equilibrium points, stability against impact, and averaged SRP effects.
- Implemented fuel-efficient control techniques LQR and Sliding mode control techniques for station keeping.
Asteroid Mining Test Bed Design and Development
Technologies & Skills
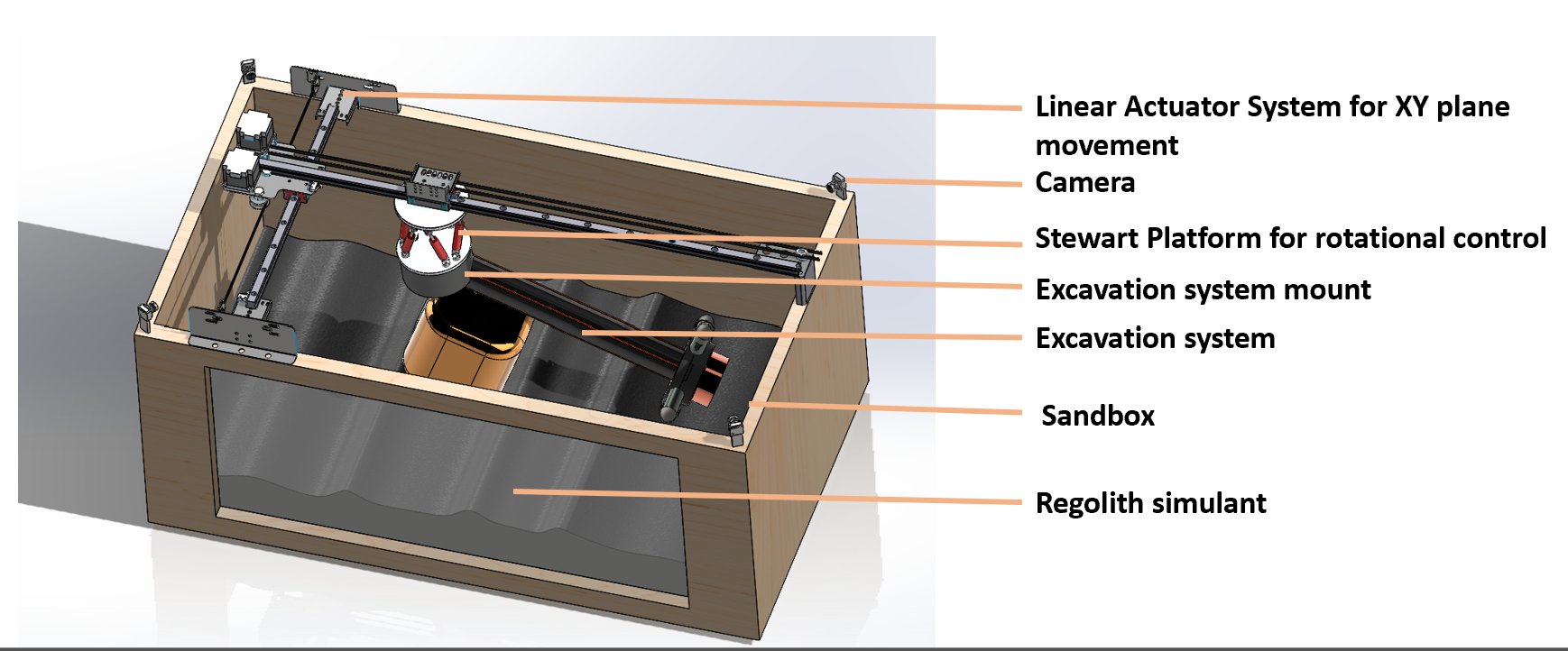
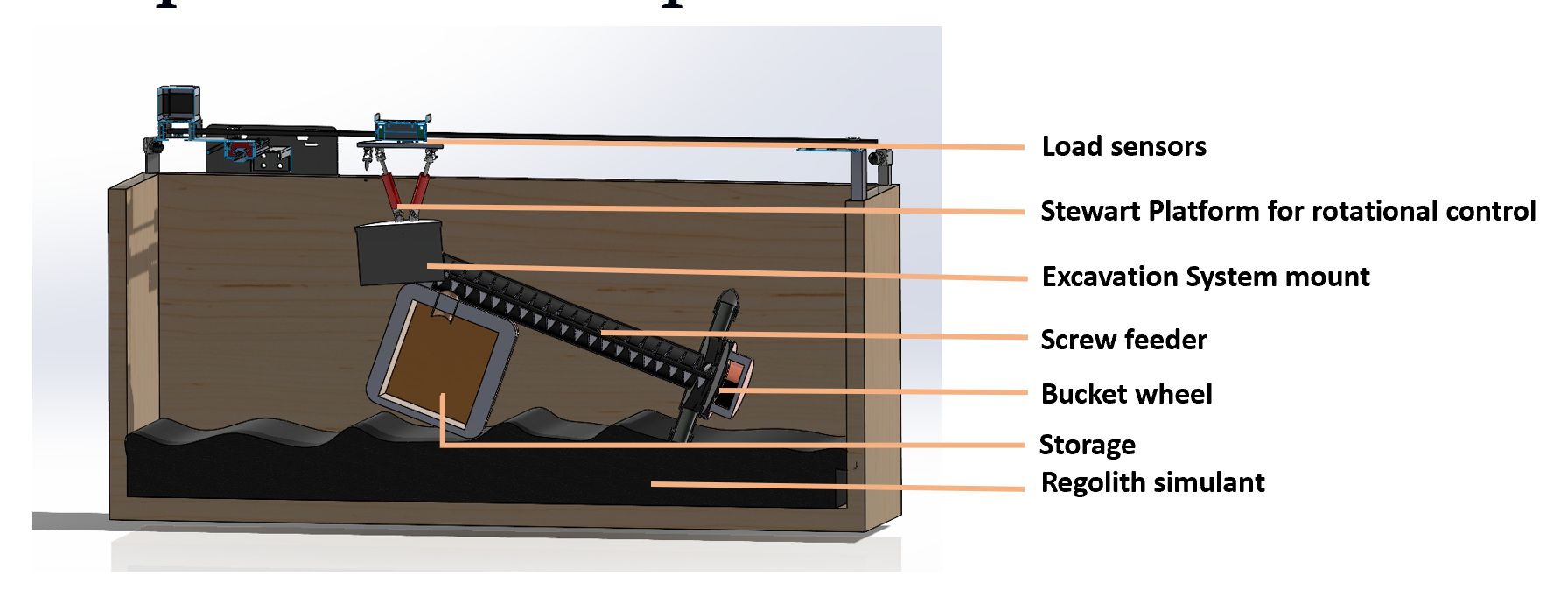
Designed and developed a comprehensive asteroid mining test bed to evaluate excavation technologies and mining techniques for asteroid resource extraction. The test bed simulates asteroid surface conditions and enables testing of various excavator designs and extraction methodologies under controlled laboratory conditions.
- Designed complete test bed structure with rotating drum mechanism to simulate asteroid surface conditions
- Developed and compared five different excavator designs for asteroid regolith extraction
- Created custom asteroid simulant materials to replicate surface characteristics and mechanical properties
- Implemented instrumentation systems for measuring excavation efficiency and material flow rates
- Conducted comparative analysis of excavator performance metrics including penetration depth, extraction rate, and energy efficiency
Sandbox for Lunar and Mars Analog Testing
Design and Development of Sandbox for Lunar and Mars Analog Test Bed
Technologies & Skills
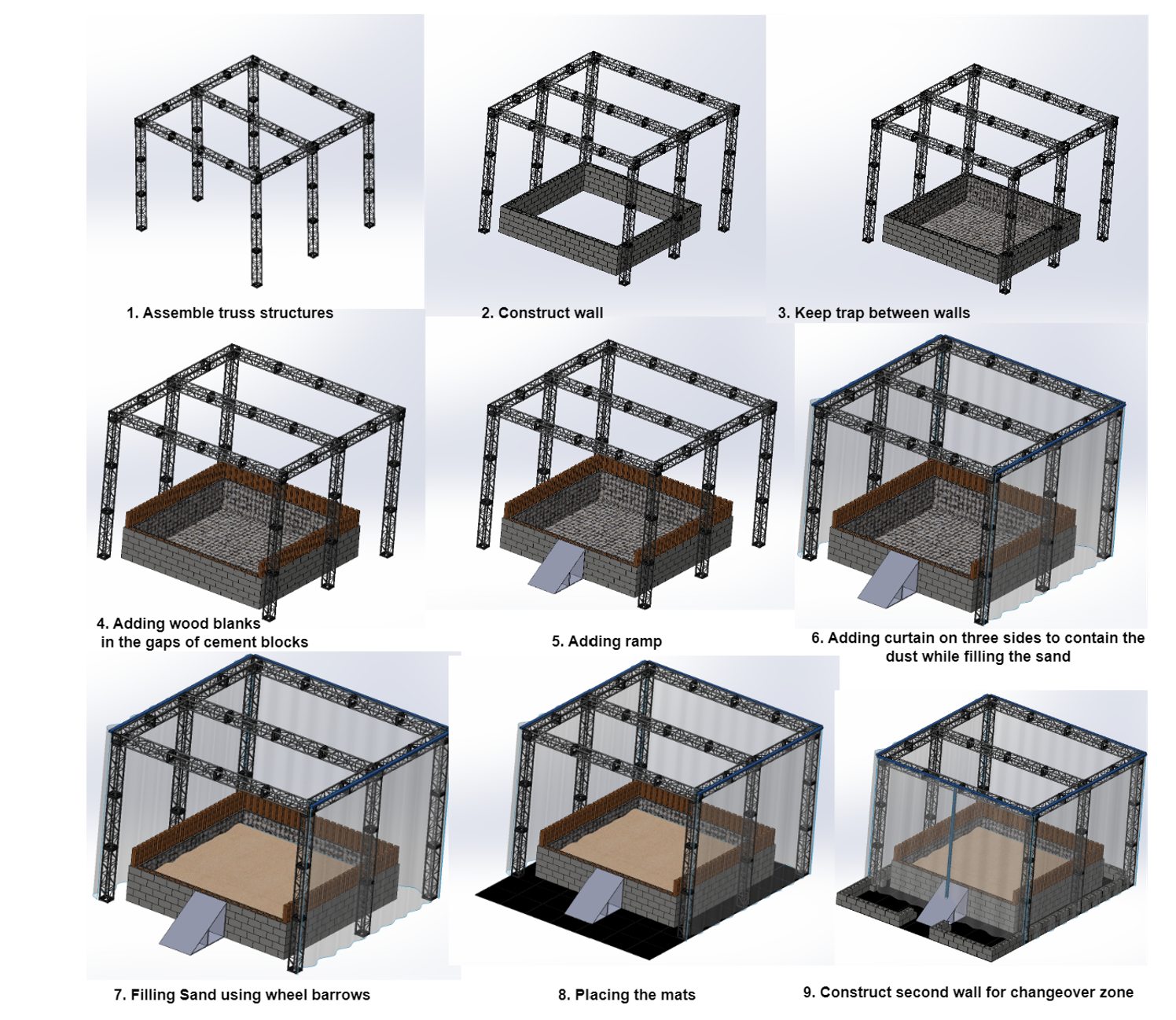
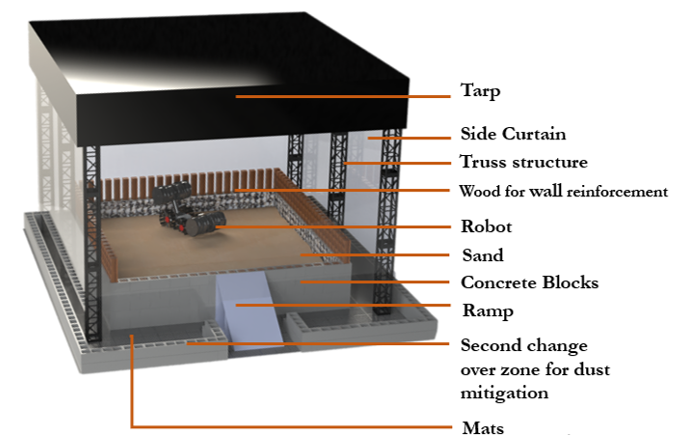
This project focuses on designing and developing a comprehensive sandbox facility for lunar and Mars analog testing. The facility provides a controlled environment for simulating extraterrestrial surface conditions and testing autonomous robotic systems, construction techniques, and equipment performance under realistic analog conditions.
- Designed sandbox structure with truss framework and support systems for stability and scalability
- Implemented multi-stage construction process including truss assembly, wall construction, and environmental containment systems
- Developed dust mitigation systems with side curtains and changeover zones to maintain controlled testing environment
- Created lunar and Mars regolith analog sand environment with realistic material properties
- Integrated ramp systems for robot access and equipment transport within the sandbox
- Designed mats and containment systems to manage sand during robotic construction and excavation tasks
Miscellaneous Projects
NASA BIG Competition 2024 - MIRACLE: Mobile Inflatable Robotic Autonomous Containment for Lunar Exploration
Technologies & Skills
As Co-Lead for the NASA BIG (Breakthrough, Innovative and Game-changing) Competition 2024, developed and visualized MIRACLE - an innovative inflatable protective trailer designed for lunar robotics. This project addresses the 2024 challenge theme of Lunar Inflatable Systems by creating a mobile protective shelter that provides thermal insulation and physical protection for rovers in extreme extraterrestrial environments. The animation demonstrates the system's capability to achieve 85% volume reduction for cost-effective launch while expanding into a fully functional "mobile garage" on the lunar surface.
- Modeled complex deployment sequences illustrating the transition from a compact 27U CubeSat configuration to a fully expanded mobile garage
- Visualized inflation mechanics and structural layering, demonstrating how aerogel and inflatable bladders integrate to provide thermal shielding
- Simulated lunar surface interactions, showcasing the trailer's mobility, dust mitigation features, and autonomous rover support functionality
- Demonstrated volumetric efficiency, highlighting the system's 85% volume reduction capability for cost-effective launch and transit
- Created detailed technical breakdowns of internal components, including sensor arrays, power harnessing systems, and environmental containment structures
- Led animation development to effectively communicate complex engineering concepts to NASA and industry expert reviewers